This page shows the publications of our lab. For a full list of an author's publications, please consult their personal page.
Publications
2026
Markus Fritzsche, David Speck, Daniel Gnad and Simon Ståhlberg.
Parallelizing Classical Planning: Critical Path Heuristics on the GPU.
In Proceedings of the 19th International Symposium on Combinatorial Search (SoCS 2026). 2026.
paper | slides | citationMarkus Fritzsche, Mikhail Gruntov, Alexander Shleyfman and Daniel Gnad.
Domain-Abstraction Heuristics for Simple Numeric Planning.
In Proceedings of the 19th International Symposium on Combinatorial Search (SoCS 2026). 2026.
paper | slides | citationJennifer Santos, Damien Van Meerbeeck, Mika Skjelnes, Arnaud Lequen and Daniel Gnad.
Robust Observation Planning via Facet Reasoning.
In FLoC 2026 Workshop on Automated Reasoning for Future Space Logistics (AR4Space). 2026.
paper | citationDamien Van Meerbeeck, Arnaud Lequen, Gilles Pesant and Jendrik Seipp.
An Automata-Based Constraint Programming Framework for Optimal Classical Planning.
In Proceedings of the 32nd International Conference on Principles and Practice of Constraint Programming (CP 2026). 2026.
paper | slides | poster | code | citationArnaud Lequen, Clément Legrand-Lixon and Léo Saulières.
Generating Explainable Counterfactual Policies through Temporal Logic Queries.
In Proceedings of the Twenty-Third International Conference on Principles of Knowledge Representation and Reasoning (KR 2026). 2026.
paper | citationArash Haratian, Arnaud Lequen, Daniel Gnad and Jendrik Seipp.
Domain Model Acquisition From Binary Traces.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | citationArnaud Lequen, Oliver Joergensen, Windy Phung, Elliot Gestrin, Damien Van Meerbeeck, Markus Fritzsche, Dominik Drexler and Jendrik Seipp.
Planner Museum: Evaluating Classical Planners Over Time.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Monotonic Variants of Saturated Cost Partitioning.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | slides | code | citationJordan Thayer, Sofia Lemons and Jendrik Seipp.
Base Strategy Still Matters: Triangle Search in Domain-Independent Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-Independent Planning (HSDIP). 2026.
paper | slides | citationDominik Drexler, Oliver Joergensen and Jendrik Seipp.
Parallel Lifted Planning via Semi-Naive Datalog Evaluation.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationDominik Drexler, Markus Fritzsche, Farid Musayev and Simon Ståhlberg.
Prompt, Prove, Patch: The Neuro-Symbolic Loop for General Policy Synthesis.
In ICAPS 2026 Workshop on Reliability In Planning and Learning (RIPL). 2026.
paper | citationWindy Phung, Dominik Drexler, Arnaud Lequen and Jendrik Seipp.
LLM-Evolved Pattern Generators for Optimal Classical Planning.
In ICAPS 2026 Workshop on Reliability In Planning and Learning (RIPL). 2026.
paper | preprint | citationElliot Gestrin and Jendrik Seipp.
LLM-Evolved Domain-Independent Heuristics for Symbolic AI Planning.
In ICAPS 2026 Workshop on Planning in the Era of LLMs (LM4Plan). 2026.
paper | citationMarkus Fritzsche, David Speck, Daniel Gnad and Simon Ståhlberg.
Parallelizing Classical Planning: Critical Path Heuristics on the GPU.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | slides | citationMarkus Fritzsche, Mikhail Gruntov, Alexander Shleyfman and Daniel Gnad.
Domain-Abstraction Heuristics for Simple Numeric Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | slides | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | slides | citationArnaud Lequen, Clément Legrand-Lixon and Léo Saulières.
Pareto Q-Learning with Reward Machines.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | citationArman Mohammadi, Markus Fritzsche and Jendrik Seipp.
Towards Symbolic Planning via Diffusion.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | citationDamien Van Meerbeeck.
An Insertion-Based Linked List Variable and Regular Constraint for Classical Planning with Constraint Programming.
In ICAPS 2026 Workshop on Constraint And Satisfiability-based Planning (CASP:ER). 2026.
paper | slides | citationFarid Musayev, Dominik Drexler, Daniel Gnad and Jendrik Seipp.
A Comparison of Sampling Strategies for Learning Policies.
In ICAPS 2026 Workshop on Reliability In Planning and Learning (RIPL). 2026.
paper | slides | citationOliver Joergensen, Dominik Drexler and Jendrik Seipp.
Distributed Parallel Datalog in Automated Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
citationOliver Joergensen, Dominik Drexler and Jendrik Seipp.
Dynamic Tree Databases in Automated Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
A Comparison of Cost Partitioning Algorithms for Multiple Sequence Alignment.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationMika Skjelnes, Dominik Drexler, Jordan Thayer, Daniel Gnad and Jendrik Seipp.
Pattern Database Heuristics for Lifted Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationElliot Gestrin, Johannes Fichte and Jendrik Seipp.
Automatically Uncovering Intended Domain Constraints in Automated Planning.
In ICAPS 2026 Workshop on Knowledge Engineering for Planning and Scheduling (KEPS). 2026.
paper | citationKristina Levina, Nikolaos Pappas, Athanasios Karapantelakis, Aneta Vulgarakis Feljan and Jendrik Seipp.
Reinforcement Learning for Long-Horizon Unordered Tasks: From Boolean to Coupled Reward Machines.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | citationAndré G. Pereira, Augusto B. Corrêa and Jendrik Seipp.
Property-Guided LLM Program Synthesis for Planning.
In arXiv:2605.16142 [cs.AI]. 2026.
preprint | citationPaul Höft.
Computing Perfect Cost Partitioning Heuristics for Classical Planning.
PhD thesis, Linköping University, 2026.
paper | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In Proceedings of the Fortieth AAAI Conference on Artificial Intelligence (AAAI 2026), pp. 36236–36244. 2026.
paper | slides | poster | citationMarkus Fritzsche, Daniel Gnad, Mikhail Gruntov and Alexander Shleyfman.
Managing Infinite Abstractions in Numeric Pattern Database Heuristics.
In Proceedings of the Fortieth AAAI Conference on Artificial Intelligence (AAAI 2026), pp. 36227–36235. 2026.
paper | slides | poster | citation
2025
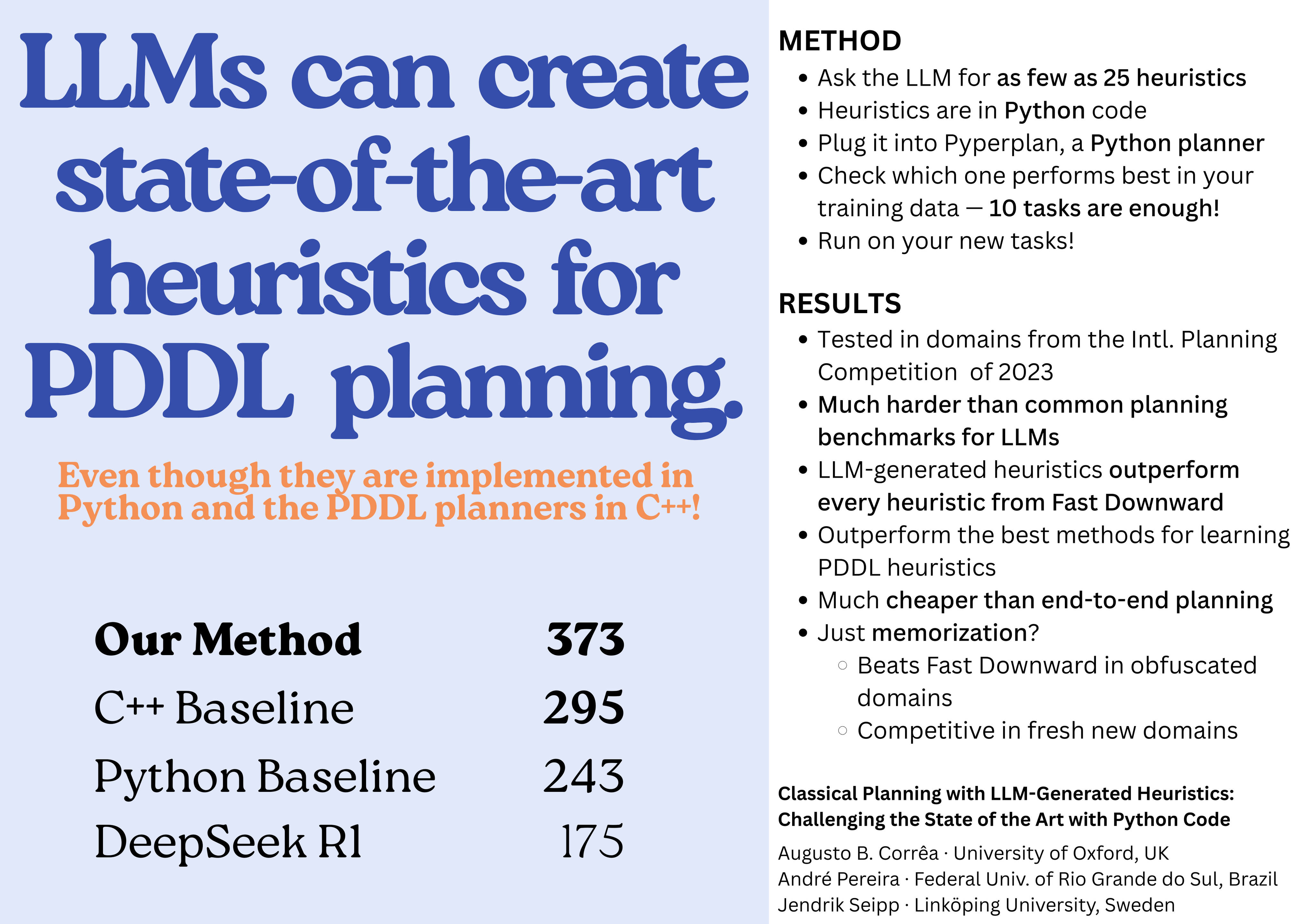
Augusto B. Corrêa, André Grahl Pereira and Jendrik Seipp.
Classical Planning with LLM-Generated Heuristics: Challenging the State of the Art with Python Code.
In Proceedings of the Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS 2025), pp. 42070–42108. 2025.
paper | preprint | slides | poster | code | citationDaniel Gnad, Markus Hecher, Sarah Gaggl, Dominik Rusovac, David Speck and Johannes K. Fichte.
Interactive Exploration of Plan Spaces.
In Proceedings of the Twenty-Second International Conference on Principles of Knowledge Representation and Reasoning (KR 2025), pp. 599–609. 2025.
paper | code | citationPaul Höft, David Speck and Jendrik Seipp.
Representing Perfect Saturated Cost Partitioning Heuristics in Classical Planning.
In Proceedings of the Twenty-Second International Conference on Principles of Knowledge Representation and Reasoning (KR 2025), pp. 821–831. 2025.
paper | slides | code | citationAugusto B. Corrêa, André G. Pereira and Jendrik Seipp.
Frontier Large Language Models Rival State-of-the-Art Planners.
In arXiv:2511.09378 [cs.AI]. 2025.
preprint | citationAugusto B. Corrêa and Jendrik Seipp.
Alternation-Based Novelty Search.
In Proceedings of the Thirty-Fifth International Conference on Automated Planning and Scheduling (ICAPS 2025), pp. 178–182. 2025.
paper | code | citationElliot Gestrin, Gustaf Söderholm, Paul Höft, Mauricio Salerno, Jendrik Seipp and Daniel Gnad.
Explainable Planning via Counterfactual Task Analysis for the Beluga Challenge and Beyond.
In ICAPS 2025 Workshop on Human-Aware and Explainable Planning (HAXP). 2025.
paper | slides | citationDominik Drexler.
Lifted Successor Generation in Numeric Planning (Extended Version).
In arXiv:2511.00673 [cs.AI]. 2025.
preprint | citationFarid Musayev, Dominik Drexler, Daniel Gnad and Jendrik Seipp.
Combining Heuristics and Transition Classifiers in Classical Planning.
In Proceedings of the 28th European Conference on Artificial Intelligence (ECAI 2025), pp. 4694–4701. 2025.
paper | slides | code | citationMauricio Salerno, Raquel Fuentetaja, David Speck and Jendrik Seipp.
Merging Cartesian Abstractions for Classical Planning.
In Proceedings of the 28th European Conference on Artificial Intelligence (ECAI 2025), pp. 4766–4773. 2025.
paper | code | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Finding Minimal Plan Reductions Using Classical Planning.
Journal of Artificial Intelligence Research 84, pp. 1–35. 2025.
paper | code | citationGregor Behnke, David Speck and Daniel Gnad.
AxSAT – Bringing Axioms to SAT Planning.
In Logics in Artificial Intelligence, pp. 77–93. 2025.
paper | code | citationMartín Pozo and Jendrik Seipp.
Abstraction Heuristics for Classical Planning Tasks with Conditional Effects.
In Proceedings of the 34th International Joint Conference on Artificial Intelligence (IJCAI 2025), pp. 8608–8616. 2025.
paper | slides | code | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In arXiv:2508.07743 [cs.AI]. 2025.
preprint | citationArnaud Lequen and Martin C. Cooper.
Analysis of Planning Instances Without Search.
The European Journal on Artificial Intelligence . 2025.
paper | citationDominik Drexler.
Learning and Exploiting Subgoal Structures in Classical Planning.
PhD thesis, Linköping University, 2025.
paper | citationDavid Speck, Jendrik Seipp and Álvaro Torralba.
Symbolic Search for Cost-Optimal Planning with Expressive Model Extensions.
Journal of Artificial Intelligence Research 82, pp. 1349–1405. 2025.
paper | code | citationDaniel Gnad, Lee-or Alon, Eyal Weiss and Alexander Shleyfman.
PDBs Go Numeric: Pattern-Database Heuristics for Simple Numeric Planning.
In Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence (AAAI 2025), pp. 26507–26515. 2025.
paper | code | citationDavid Speck, Markus Hecher, Daniel Gnad, Johannes K. Fichte and Augusto B. Corrêa.
Counting and Reasoning with Plans.
In Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence (AAAI 2025), pp. 26688–26696. 2025.
paper | code | citationOliver Joergensen, Vy Le, Tin Nguyen, Khang Nguyen and Ginel Dorleon.
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency.
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART). 2025.
paper | citation
{kind=link}
2024
Dominik Drexler, Simon Ståhlberg, Blai Bonet and Hector Geffner.
Symmetries and Expressive Requirements for Learning General Policies.
In Proceedings of the Twenty-First International Conference on Principles of Knowledge Representation and Reasoning (KR 2024). 2024.
paper | slides | citationMartin Funkquist, Simon Ståhlberg and Hector Geffner.
Learning to Ground Existentially Quantified Goals.
In Proceedings of the Twenty-First International Conference on Principles of Knowledge Representation and Reasoning (KR 2024). 2024.
paper | slides | code | citationJendrik Seipp.
Dissecting Scorpion: Ablation Study of an Optimal Classical Planner.
In Proceedings of the 27th European Conference on Artificial Intelligence (ECAI 2024), pp. 39–42. 2024.
paper | slides | code | citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
Cost Partitioning for Multiple Sequence Alignment.
In Proceedings of the 27th European Conference on Artificial Intelligence (ECAI 2024), pp. 4224–4231. 2024.
paper | code | citationBlai Bonet, Dominik Drexler and Hector Geffner.
On Policy Reuse: An Expressive Language for Representing and Executing General Policies that Call Other Policies.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 31–39. 2024.
paper | slides | citationClemens Büchner, Patrick Ferber, Jendrik Seipp and Malte Helmert.
Abstraction Heuristics for Factored Tasks.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 40–49. 2024.
paper | slides | poster | code | citationPaul Höft, David Speck, Florian Pommerening and Jendrik Seipp.
Versatile Cost Partitioning with Exact Sensitivity Analysis.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 276–280. 2024.
paper | slides | poster | code | citationJendrik Seipp.
Efficiently Computing Transitions in Cartesian Abstractions.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 509–513. 2024.
paper | slides | code | citationDavid Speck and Daniel Gnad.
Decoupled Search for the Masses: A Novel Task Transformation for Classical Planning.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 546–554. 2024.
paper | slides | code | citationElliot Gestrin, Marco Kuhlmann and Jendrik Seipp.
NL2Plan: Robust LLM-Driven Planning from Minimal Text Descriptions.
In ICAPS 2024 Workshop on Human-Aware and Explainable Planning (HAXP). 2024.
paper | preprint | slides | code | citationAugusto B. Corrêa and Jendrik Seipp.
Consolidating LAMA with Best-First Width Search.
In ICAPS 2024 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2024.
paper | slides | citationDaniel Gnad, Lee or Alon, Eyal Weiss and Alexander Shleyfman.
PDBs Go Numeric: Pattern-Database Heuristics for Simple Numeric Planning.
In ICAPS 2024 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2024.
paper | citationDaniel Gnad and David Speck.
On an Attempt at Casting Orbit Search as a Task Transformation.
In ICAPS 2024 Workshop on Echoing (failed) Efforts in Planning (WEEP). 2024.
paper | citationDominik Drexler, Simon Ståhlberg, Blai Bonet and Hector Geffner.
Equivalence-Based Abstractions for Learning General Policies.
In ICAPS 2024 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2024.
paper | slides | citationKristina Levina, Nikolaos Pappas, Athanasios Karapantelakis, Aneta Vulgarakis Feljan and Jendrik Seipp.
Numeric Reward Machines.
In ICAPS 2024 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2024.
paper | poster | citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
Cost Partitioning for Multiple Sequence Alignment.
In ICAPS 2024 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2024.
paper | slides | citation (Superseded by this paper.)Dominik Drexler, Jendrik Seipp and Hector Geffner.
Expressing and Exploiting Subgoal Structure in Classical Planning Using Sketches.
Journal of Artificial Intelligence Research 80, pp. 171–208. 2024.
paper | code | citationDamien Van Meerbeeck, Gilles Pesant and Jendrik Seipp.
End-to-End Classical Planning using CP and Belief Propagation (Extended Abstract).
In Extended Abstracts Presented at CPAIOR 2024. 2024.
paper | poster | citationAyal Taitler, Ron Alford, Joan Espasa, Gregor Behnke, Daniel Fišer, Michael Gimelfarb, Florian Pommerening, Scott Sanner, Enrico Scala, Dominik Schreiber, Javier Segovia-Aguas and Jendrik Seipp.
The 2023 International Planning Competition.
AI Magazine 45, pp. 280–296. 2024.
paper | citation
2023
Blai Bonet, Dominik Drexler and Hector Geffner.
General and Reusable Indexical Policies and Sketches.
In NeurIPS 2023 Workshop on Generalization in Planning. 2023.
paper | poster | code | citationRemo Christen, Salomé Eriksson, Michael Katz, Christian Muise, Alice Petrov, Florian Pommerening, Jendrik Seipp, Silvan Sievers and David Speck.
PARIS: Planning Algorithms for Reconfiguring Independent Sets.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 453–460. 2023.
paper | slides | poster | code | citationPaul Höft, David Speck and Jendrik Seipp.
Sensitivity Analysis for Saturated Post-hoc Optimization in Classical Planning.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 1044–1051. 2023.
paper | slides | poster | code | citationThorsten Klößner, Jendrik Seipp and Marcel Steinmetz.
Cartesian Abstractions and Saturated Cost Partitioning in Probabilistic Planning.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 1272–1279. 2023.
paper | slides | poster | code | citationSimon Ståhlberg.
Lifted Successor Generation by Maximum Clique Enumeration.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 2194–2201. 2023.
paper | citationSimon Ståhlberg, Blai Bonet and Hector Geffner.
Learning General Policies with Policy Gradient Methods.
In Proceedings of the Twentieth International Conference on Principles of Knowledge Representation and Reasoning (KR 2023), pp. 647–657. 2023.
paper | citationDominik Drexler, Jendrik Seipp and Hector Geffner.
Learning Hierarchical Policies by Iteratively Reducing the Width of Sketch Rules.
In Proceedings of the Twentieth International Conference on Principles of Knowledge Representation and Reasoning (KR 2023), pp. 208–218. 2023.
paper | slides | code | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Eliminating Redundant Actions from Plans using Classical Planning.
In Proceedings of the Twentieth International Conference on Principles of Knowledge Representation and Reasoning (KR 2023), pp. 774–778. 2023.
paper | code | citationClemens Büchner, Remo Christen, Augusto B. Corrêa, Salomé Eriksson, Patrick Ferber, Jendrik Seipp and Silvan Sievers.
Fast Downward Stone Soup 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | code | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
Levitron: Combining Ground and Lifted Planning.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
The Powerlifted Planning System in the IPC 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
Scorpion Maidu: Width Search in the Scorpion Planning System.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDominik Drexler, Daniel Gnad, Paul Höft, Jendrik Seipp, David Speck and Simon Ståhlberg.
Ragnarok.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDominik Drexler, Jendrik Seipp and David Speck.
Odin: A Planner Based on Saturated Transition Cost Partitioning.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationPatrick Ferber, Michael Katz, Jendrik Seipp, Silvan Sievers, Daniel Borrajo, Isabel Cenamor, Tomas de la Rosa, Fernando Fernandez-Rebollo, Carlos Linares López, Sergio Nuñez, Alberto Pozanco, Horst Samulowitz and Shirin Sohrabi.
Hapori Stone Soup.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationMaximilian Fickert and Daniel Gnad.
DiSCO: Decoupled Search + COnjunctions.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDaniel Gnad, Silvan Sievers and Álvaro Torralba.
DecAbStar.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDaniel Gnad, Álvaro Torralba and Alexander Shleyfman.
DecStar-2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationPaul Höft, David Speck and Jendrik Seipp.
Dofri.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Spock: Fast Downward Stone Soup with Redundant Action Elimination.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationJendrik Seipp.
Scorpion 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDavid Speck.
SymK – A Versatile Symbolic Search Planner.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDavid Speck, Paul Höft, Daniel Gnad and Jendrik Seipp.
Finding Matrix Multiplication Algorithms with Classical Planning — Extended Abstract.
In The 35th Annual Workshop of the Swedish Artificial Intelligence Society (SAIS). 2023.
paper | slides | poster | code | citation (Superseded by this paper.)Dominik Drexler and Jendrik Seipp.
DLPlan: Description Logics State Features for Planning.
In ICAPS 2023 System Demonstrations and Exhibits. 2023.
paper | citationDaniel Gnad, Malte Helmert, Peter Jonsson and Alexander Shleyfman.
Planning over Integers: Compilations and Undecidability.
In Proceedings of the Thirty-Third International Conference on Automated Planning and Scheduling (ICAPS 2023), pp. 148–152. 2023.
paper | citationDaniel Gnad, Silvan Sievers and Álvaro Torralba.
Efficient Evaluation of Large Abstractions for Decoupled Search: Merge-and-Shrink and Symbolic Pattern Databases.
In Proceedings of the Thirty-Third International Conference on Automated Planning and Scheduling (ICAPS 2023), pp. 138–147. 2023.
paper | code | citationDavid Speck, Paul Höft, Daniel Gnad and Jendrik Seipp.
Finding Matrix Multiplication Algorithms with Classical Planning.
In Proceedings of the Thirty-Third International Conference on Automated Planning and Scheduling (ICAPS 2023), pp. 411–416. 2023.
paper | slides | poster | code | citationGregor Behnke, David Speck, Michael Katz and Shirin Sohrabi.
On Partial Satisfaction Planning with Total-Order HTNs.
In Proceedings of the Thirty-Third International Conference on Automated Planning and Scheduling (ICAPS 2023), pp. 42–51. 2023.
paper | code | citationAlexander Shleyfman, Daniel Gnad and Peter Jonsson.
Structurally Restricted Fragments of Numeric Planning – A Complexity Analysis.
In Proceedings of the Thirty-Seventh AAAI Conference on Artificial Intelligence (AAAI 2023), pp. 12112–12119. 2023.
paper | citation
2022
Simon Ståhlberg, Blai Bonet and Hector Geffner.
Learning Generalized Policies without Supervision Using GNNs.
In Proceedings of the Nineteenth International Conference on Principles of Knowledge Representation and Reasoning (KR 2022), pp. 474–483. 2022.
paper | slides | code | citationPatrick Ferber, Liat Cohen, Jendrik Seipp and Thomas Keller.
Learning and Exploiting Progress States in Greedy Best-First Search.
In Proceedings of the 31st International Joint Conference on Artificial Intelligence (IJCAI 2022), pp. 4740–4746. 2022.
paper | slides | poster | code | citationDominik Drexler, Javier Segovia-Aguas and Jendrik Seipp.
Learning General Policies and Helpful Action Classifiers from Partial State Spaces.
In IJCAI 2022 Workshop on Generalization in Planning. 2022.
paper | slides | citationSilvan Sievers, Daniel Gnad and Álvaro Torralba.
Additive Pattern Databases for Decoupled Search.
In Proceedings of the 15th Annual Symposium on Combinatorial Search (SoCS 2022), pp. 180–189. 2022.
paper | code | citationKilian Hu and David Speck.
On Bidirectional Heuristic Search in Classical Planning: An Analysis of BAE*.
In Proceedings of the 15th Annual Symposium on Combinatorial Search (SoCS 2022), pp. 91–99. 2022.
paper | slides | code | citationRemo Christen, Salomé Eriksson, Michael Katz, Emil Keyder, Christian Muise, Alice Petrov, Florian Pommerening, Jendrik Seipp, Silvan Sievers and David Speck.
(PARIS) Planning Algorithms for Reconfiguring Independent Sets.
In First CoRe Challenge: Solver and Graph Descriptions, pp. 15–22. 2022.
paper | citationSimon Ståhlberg, Blai Bonet and Hector Geffner.
Learning General Optimal Policies with Graph Neural Networks: Expressive Power, Transparency, and Limits.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 629–637. 2022.
paper | slides | citationAugusto B. Corrêa and Jendrik Seipp.
Best-First Width Search for Lifted Classical Planning.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 11–15. 2022.
paper | slides | poster | code | citationDominik Drexler, Jendrik Seipp and Hector Geffner.
Learning Sketches for Decomposing Planning Problems into Subproblems of Bounded Width.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 62–70. 2022.
paper | slides | poster | code | citationDaniel Gnad, Álvaro Torralba and Daniel Fišer.
Beyond Stars - Generalized Topologies for Decoupled Search.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 110–118. 2022.
paper | code | citationDavid Speck and Jendrik Seipp.
New Refinement Strategies for Cartesian Abstractions.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 348–352. 2022.
paper | slides | recording | poster | code | citationJulian von Tschammer, Robert Mattmüller and David Speck.
Loopless Top-K Planning.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 380–384. 2022.
paper | slides | recording | poster | citationChristian Muise, Florian Pommerening, Jendrik Seipp and Michael Katz.
Planutils: Bringing Planning to the Masses.
In ICAPS 2022 System Demonstrations and Exhibits. 2022.
paper | recording | poster | citationClemens Büchner, Patrick Ferber, Jendrik Seipp and Malte Helmert.
A Comparison of Abstraction Heuristics for Rubik's Cube.
In ICAPS 2022 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2022.
paper | slides | recording | code | citationAndré Biedenkapp, David Speck, Silvan Sievers, Frank Hutter, Marius Lindauer and Jendrik Seipp.
Learning Domain-Independent Policies for Open List Selection.
In ICAPS 2022 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2022.
paper | slides | recording | citationDavid Speck.
Symbolic Search for Optimal Planning with Expressive Extensions.
PhD thesis, University of Freiburg, 2022.
paper | citationPatrick Ferber and Jendrik Seipp.
Explainable Planner Selection for Classical Planning.
In Proceedings of the Thirty-Sixth AAAI Conference on Artificial Intelligence (AAAI 2022), pp. 9741–9749. 2022.
paper | slides | poster | code | citation
2021
Dominik Drexler, Jendrik Seipp and Hector Geffner.
Expressing and Exploiting the Common Subgoal Structure of Classical Planning Domains Using Sketches.
In Proceedings of the Eighteenth International Conference on Principles of Knowledge Representation and Reasoning (KR 2021), pp. 258–268. 2021.
paper | slides | recording | poster | citationSimon Ståhlberg, Guillem Francès and Jendrik Seipp.
Learning Generalized Unsolvability Heuristics for Classical Planning.
In Proceedings of the 30th International Joint Conference on Artificial Intelligence (IJCAI 2021), pp. 4175–4181. 2021.
paper | slides | poster | code | citationDominik Drexler, Jendrik Seipp and David Speck.
Subset-Saturated Transition Cost Partitioning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 131–139. 2021.
paper | slides | poster | code | citationFlorian Pommerening, Thomas Keller, Valentina Halasi, Jendrik Seipp, Silvan Sievers and Malte Helmert.
Dantzig-Wolfe Decomposition for Cost Partitioning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 271–280. 2021.
paper | technical report | slides | recording | poster | code | citationJendrik Seipp.
Online Saturated Cost Partitioning for Classical Planning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 317–321. 2021.
paper | slides | poster | code | citationÁlvaro Torralba, Jendrik Seipp and Silvan Sievers.
Automatic Instance Generation for Classical Planning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 376–384. 2021.
paper | slides | poster | code | citationJendrik Seipp, Thomas Keller and Malte Helmert.
Saturated Post-hoc Optimization for Classical Planning.
In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence (AAAI 2021), pp. 11947–11953. 2021.
paper | slides | recording | poster | code | citation