
About me
I'm a Senior Associate Professor in Artificial Intelligence at Linköping University, Sweden, where I head the Machine Reasoning Lab in the AIICS division. I mainly work on AI planning and its connections to machine learning.
Short bio
I earned my MSc in computer science from the University of Freiburg, Germany, in 2012 and my PhD from the University of Basel, Switzerland, in 2018. I was a postdoctoral researcher in Basel until 2020, then joined Linköping University as an assistant professor in 2021, became docent in 2022, associate professor in 2023, and senior associate professor in 2024. My research is currently supported by WASP (Wallenberg AI, Autonomous Systems and Software Program), a Swedish Research Council Starting Grant, a Wallenberg Academy Fellowship, and an SSF Future Research Leaders grant.
For more information, please see my academic CV.
My office 2G:466 is located in the E-building at Campus Valla in Linköping.
Software
- Planning system: Fast Downward
- Optimal classical planner: Scorpion
- Experiment framework: Downward Lab
Tutorials
- ICAPS 2020 tutorial "Evaluating Planners with Downward Lab"
- ICAPS 2015 tutorial "Latest Trends in Abstraction Heuristics for Classical Planning" (with Malte Helmert and Silvan Sievers)
Awards
- NeurIPS 2025 Top Reviewer Award at the 39th Annual Conference on Neural Information Processing Systems (NeurIPS 2025).
- ICAPS 2025 Influential Paper Award for the paper Counterexample-guided Cartesian Abstraction Refinement at the 35th International Conference on Automated Planning and Scheduling (ICAPS 2025).
- Winner of the Explainability Challenge of the Beluga Competition organized by the TUPLES Consortium.
- Distinguished Teacher Award for the "Automated Planning" course awarded by Linköping University.
- 4x First Place, 2x Second Place at the Second CoRe Challenge for the system PARIS 2023: Planning Algorithms for Reconfiguring Independent Sets.
- Winner, Deterministic Optimal Track for the Ragnarok planner at the 10th International Planning Competition (IPC 2023) at ICAPS 2023.
- Winner, Deterministic Satisficing Track for the Scorpion Maidu and Levitron planners at the 10th International Planning Competition (IPC 2023) at ICAPS 2023.
- Runner-Up, Deterministic Agile Track for the Fast Downward Stone Soup 2023 planner at the 10th International Planning Competition (IPC 2023) at ICAPS 2023.
- 4x First Place, 3x Second Place, 1x Third Place (in nine tracks) at the First CoRe Challenge for the system PARIS: Planning Algorithms for Reconfiguring Independent Sets at the ICALP 2022 Workshop on Combinatorial Reconfiguration, Paris.
- Second Place, System Demonstrations Track for the system Planutils: Bringing Planning to the Masses at the 32nd International Conference on Automated Planning and Scheduling (ICAPS 2022).
- IJCAI 2021 Distinguished Paper Award for the paper Learning Generalized Unsolvability Heuristics for Classical Planning at the 30th International Joint Conference on Artificial Intelligence (IJCAI 2021).
- ICAPS 2020 Best Dissertation Award for the doctoral thesis Counterexample-guided Cartesian Abstraction Refinement and Saturated Cost Partitioning for Optimal Classical Planning at the 30th International Conference on Automated Planning and Scheduling (ICAPS 2020).
- SoCS 2020 Best Paper Award for the paper An Atom-Centric Perspective on Stubborn Sets at the 13th International Symposium on Combinatorial Search (SoCS 2020).
- Winner, Deterministic Sequential Satisficing Track for the planning system Fast Downward Stone Soup 2018 at the 9th International Planning Competition (IPC 2018) at ICAPS 2018.
- Winner, Deterministic Sequential Cost-Bounded Track for the planning system Fast Downward Stone Soup 2018 at the 9th International Planning Competition (IPC 2018) at ICAPS 2018.
- SoCS 2017 Best Student Paper Award for the paper Better Orders for Saturated Cost Partitioning in Optimal Classical Planning at the 10th Annual Symposium on Combinatorial Search (SoCS 2017).
- Winner, Unsolvability IPC 2016 for the planning system Fast Downward Aidos at the 1st Unsolvability International Planning Competition (UIPC 2016) at ICAPS 2016.
- AAAI 2015 Outstanding Paper Award for the paper From Non-Negative to General Operator Cost Partitioning at the 29th AAAI Conference on Artificial Intelligence (AAAI 2015).
- Runner-Up and "Best Learner" Award, Learning Track for the planning system Fast Downward Cedalion at the 8th International Planning Competition (IPC 2014) at ICAPS 2014.
- Third Place and "Best Basic Solver" Award, Learning Track for the planning system Fast Downward SMAC at the 8th International Planning Competition (IPC 2014) at ICAPS 2014.
- Winner, Deterministic Sequential Optimization Track for the planning system Fast Downward Stone Soup-1 at the 7th International Planning Competition (IPC 2011) at ICAPS 2011.
- Runner-Up, Deterministic Sequential Satisficing Track for the planning system Fast Downward Stone Soup at the 7th International Planning Competition (IPC 2011) at ICAPS 2011.
- Runner-Up, Learning Track for the planning system Fast Downward Autotune-speed at the 7th International Planning Competition (IPC 2011) at ICAPS 2011.
Publications
2026
Damien Van Meerbeeck, Arnaud Lequen, Gilles Pesant and Jendrik Seipp.
An Automata-Based Constraint Programming Framework for Optimal Classical Planning.
In Proceedings of the 32nd International Conference on Principles and Practice of Constraint Programming (CP 2026). 2026.
paper | slides | poster | code | citationArash Haratian, Arnaud Lequen, Daniel Gnad and Jendrik Seipp.
Domain Model Acquisition From Binary Traces.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | citationArnaud Lequen, Oliver Joergensen, Windy Phung, Elliot Gestrin, Damien Van Meerbeeck, Markus Fritzsche, Dominik Drexler and Jendrik Seipp.
Planner Museum: Evaluating Classical Planners Over Time.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Monotonic Variants of Saturated Cost Partitioning.
In Proceedings of the Thirty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2026). 2026.
paper | slides | code | citationJordan Thayer, Sofia Lemons and Jendrik Seipp.
Base Strategy Still Matters: Triangle Search in Domain-Independent Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-Independent Planning (HSDIP). 2026.
paper | slides | citationDominik Drexler, Oliver Joergensen and Jendrik Seipp.
Parallel Lifted Planning via Semi-Naive Datalog Evaluation.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationWindy Phung, Dominik Drexler, Arnaud Lequen and Jendrik Seipp.
LLM-Evolved Pattern Generators for Optimal Classical Planning.
In ICAPS 2026 Workshop on Reliability In Planning and Learning (RIPL). 2026.
paper | preprint | citationElliot Gestrin and Jendrik Seipp.
LLM-Evolved Domain-Independent Heuristics for Symbolic AI Planning.
In ICAPS 2026 Workshop on Planning in the Era of LLMs (LM4Plan). 2026.
paper | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | slides | citationArman Mohammadi, Markus Fritzsche and Jendrik Seipp.
Towards Symbolic Planning via Diffusion.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | citationFarid Musayev, Dominik Drexler, Daniel Gnad and Jendrik Seipp.
A Comparison of Sampling Strategies for Learning Policies.
In ICAPS 2026 Workshop on Reliability In Planning and Learning (RIPL). 2026.
paper | slides | citationOliver Joergensen, Dominik Drexler and Jendrik Seipp.
Distributed Parallel Datalog in Automated Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
citationOliver Joergensen, Dominik Drexler and Jendrik Seipp.
Dynamic Tree Databases in Automated Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
A Comparison of Cost Partitioning Algorithms for Multiple Sequence Alignment.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationMika Skjelnes, Dominik Drexler, Jordan Thayer, Daniel Gnad and Jendrik Seipp.
Pattern Database Heuristics for Lifted Planning.
In ICAPS 2026 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2026.
paper | citationElliot Gestrin, Johannes Fichte and Jendrik Seipp.
Automatically Uncovering Intended Domain Constraints in Automated Planning.
In ICAPS 2026 Workshop on Knowledge Engineering for Planning and Scheduling (KEPS). 2026.
paper | citationKristina Levina, Nikolaos Pappas, Athanasios Karapantelakis, Aneta Vulgarakis Feljan and Jendrik Seipp.
Reinforcement Learning for Long-Horizon Unordered Tasks: From Boolean to Coupled Reward Machines.
In ICAPS 2026 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2026.
paper | citationAndré G. Pereira, Augusto B. Corrêa and Jendrik Seipp.
Property-Guided LLM Program Synthesis for Planning.
In arXiv:2605.16142 [cs.AI]. 2026.
preprint | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In Proceedings of the Fortieth AAAI Conference on Artificial Intelligence (AAAI 2026), pp. 36236–36244. 2026.
paper | slides | poster | citation
2025
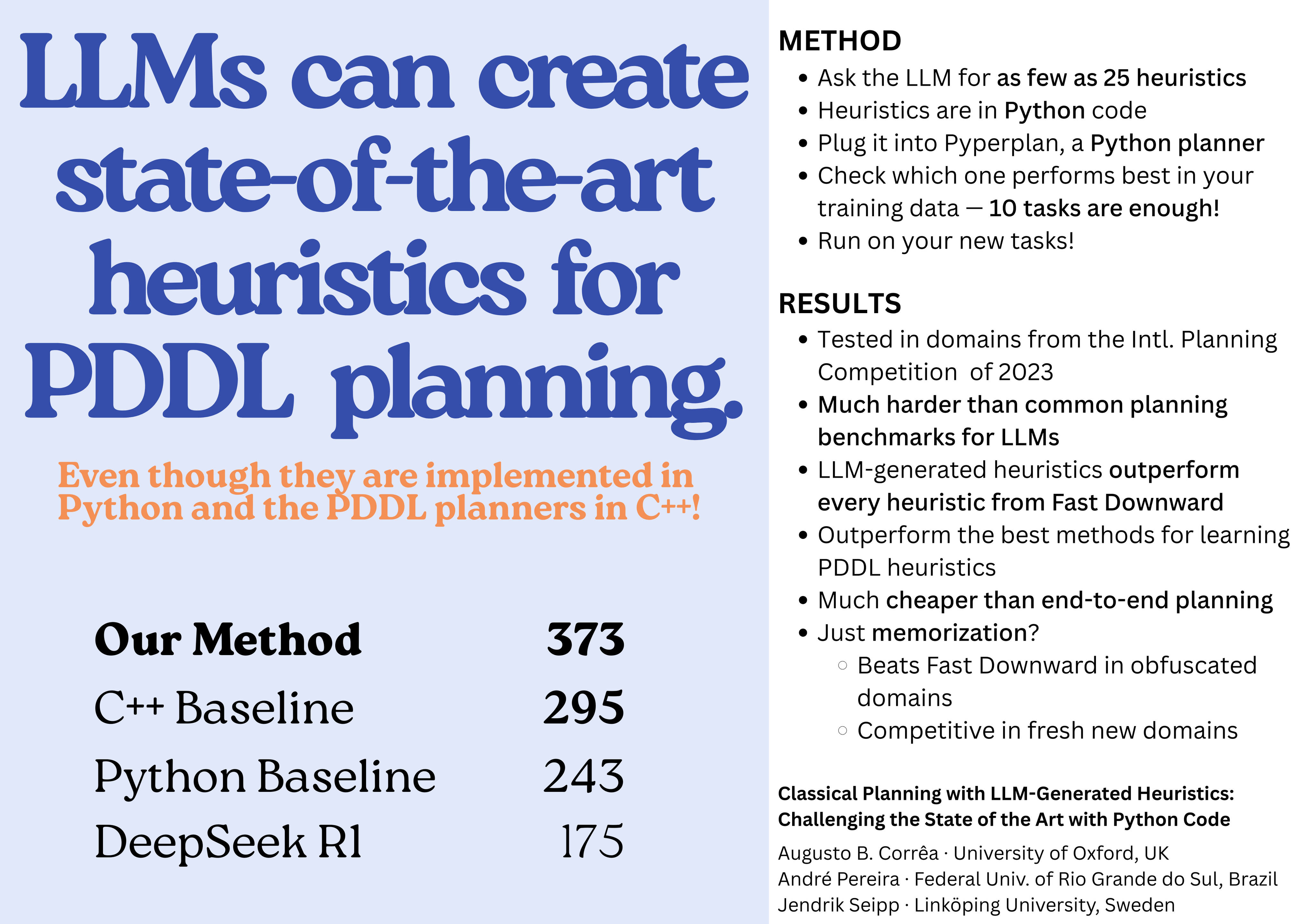
Augusto B. Corrêa, André Grahl Pereira and Jendrik Seipp.
Classical Planning with LLM-Generated Heuristics: Challenging the State of the Art with Python Code.
In Proceedings of the Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS 2025), pp. 42070–42108. 2025.
paper | preprint | slides | poster | code | citationPaul Höft, David Speck and Jendrik Seipp.
Representing Perfect Saturated Cost Partitioning Heuristics in Classical Planning.
In Proceedings of the Twenty-Second International Conference on Principles of Knowledge Representation and Reasoning (KR 2025), pp. 821–831. 2025.
paper | slides | code | citationAugusto B. Corrêa, André G. Pereira and Jendrik Seipp.
Frontier Large Language Models Rival State-of-the-Art Planners.
In arXiv:2511.09378 [cs.AI]. 2025.
preprint | citationAugusto B. Corrêa and Jendrik Seipp.
Alternation-Based Novelty Search.
In Proceedings of the Thirty-Fifth International Conference on Automated Planning and Scheduling (ICAPS 2025), pp. 178–182. 2025.
paper | code | citationElliot Gestrin, Gustaf Söderholm, Paul Höft, Mauricio Salerno, Jendrik Seipp and Daniel Gnad.
Explainable Planning via Counterfactual Task Analysis for the Beluga Challenge and Beyond.
In ICAPS 2025 Workshop on Human-Aware and Explainable Planning (HAXP). 2025.
paper | slides | citationFarid Musayev, Dominik Drexler, Daniel Gnad and Jendrik Seipp.
Combining Heuristics and Transition Classifiers in Classical Planning.
In Proceedings of the 28th European Conference on Artificial Intelligence (ECAI 2025), pp. 4694–4701. 2025.
paper | slides | code | citationMauricio Salerno, Raquel Fuentetaja, David Speck and Jendrik Seipp.
Merging Cartesian Abstractions for Classical Planning.
In Proceedings of the 28th European Conference on Artificial Intelligence (ECAI 2025), pp. 4766–4773. 2025.
paper | code | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Finding Minimal Plan Reductions Using Classical Planning.
Journal of Artificial Intelligence Research 84, pp. 1–35. 2025.
paper | code | citationMartín Pozo and Jendrik Seipp.
Abstraction Heuristics for Classical Planning Tasks with Conditional Effects.
In Proceedings of the 34th International Joint Conference on Artificial Intelligence (IJCAI 2025), pp. 8608–8616. 2025.
paper | slides | code | citationMarkus Fritzsche, Elliot Gestrin and Jendrik Seipp.
Symmetry-Aware Transformer Training for Automated Planning.
In arXiv:2508.07743 [cs.AI]. 2025.
preprint | citationDavid Speck, Jendrik Seipp and Álvaro Torralba.
Symbolic Search for Cost-Optimal Planning with Expressive Model Extensions.
Journal of Artificial Intelligence Research 82, pp. 1349–1405. 2025.
paper | code | citation
{kind=link}
2024
Jendrik Seipp.
Dissecting Scorpion: Ablation Study of an Optimal Classical Planner.
In Proceedings of the 27th European Conference on Artificial Intelligence (ECAI 2024), pp. 39–42. 2024.
paper | slides | code | citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
Cost Partitioning for Multiple Sequence Alignment.
In Proceedings of the 27th European Conference on Artificial Intelligence (ECAI 2024), pp. 4224–4231. 2024.
paper | code | citationClemens Büchner, Patrick Ferber, Jendrik Seipp and Malte Helmert.
Abstraction Heuristics for Factored Tasks.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 40–49. 2024.
paper | slides | poster | code | citationPaul Höft, David Speck, Florian Pommerening and Jendrik Seipp.
Versatile Cost Partitioning with Exact Sensitivity Analysis.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 276–280. 2024.
paper | slides | poster | code | citationJendrik Seipp.
Efficiently Computing Transitions in Cartesian Abstractions.
In Proceedings of the Thirty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2024), pp. 509–513. 2024.
paper | slides | code | citationElliot Gestrin, Marco Kuhlmann and Jendrik Seipp.
NL2Plan: Robust LLM-Driven Planning from Minimal Text Descriptions.
In ICAPS 2024 Workshop on Human-Aware and Explainable Planning (HAXP). 2024.
paper | preprint | slides | code | citationAugusto B. Corrêa and Jendrik Seipp.
Consolidating LAMA with Best-First Width Search.
In ICAPS 2024 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2024.
paper | slides | citationKristina Levina, Nikolaos Pappas, Athanasios Karapantelakis, Aneta Vulgarakis Feljan and Jendrik Seipp.
Numeric Reward Machines.
In ICAPS 2024 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2024.
paper | poster | citationMika Skjelnes, Daniel Gnad and Jendrik Seipp.
Cost Partitioning for Multiple Sequence Alignment.
In ICAPS 2024 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2024.
paper | slides | citation (Superseded by this paper.)Dominik Drexler, Jendrik Seipp and Hector Geffner.
Expressing and Exploiting Subgoal Structure in Classical Planning Using Sketches.
Journal of Artificial Intelligence Research 80, pp. 171–208. 2024.
paper | code | citationDamien Van Meerbeeck, Gilles Pesant and Jendrik Seipp.
End-to-End Classical Planning using CP and Belief Propagation (Extended Abstract).
In Extended Abstracts Presented at CPAIOR 2024. 2024.
paper | poster | citationAyal Taitler, Ron Alford, Joan Espasa, Gregor Behnke, Daniel Fišer, Michael Gimelfarb, Florian Pommerening, Scott Sanner, Enrico Scala, Dominik Schreiber, Javier Segovia-Aguas and Jendrik Seipp.
The 2023 International Planning Competition.
AI Magazine 45, pp. 280–296. 2024.
paper | citation
2023
Remo Christen, Salomé Eriksson, Michael Katz, Christian Muise, Alice Petrov, Florian Pommerening, Jendrik Seipp, Silvan Sievers and David Speck.
PARIS: Planning Algorithms for Reconfiguring Independent Sets.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 453–460. 2023.
paper | slides | poster | code | citationPaul Höft, David Speck and Jendrik Seipp.
Sensitivity Analysis for Saturated Post-hoc Optimization in Classical Planning.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 1044–1051. 2023.
paper | slides | poster | code | citationThorsten Klößner, Jendrik Seipp and Marcel Steinmetz.
Cartesian Abstractions and Saturated Cost Partitioning in Probabilistic Planning.
In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), pp. 1272–1279. 2023.
paper | slides | poster | code | citationDominik Drexler, Jendrik Seipp and Hector Geffner.
Learning Hierarchical Policies by Iteratively Reducing the Width of Sketch Rules.
In Proceedings of the Twentieth International Conference on Principles of Knowledge Representation and Reasoning (KR 2023), pp. 208–218. 2023.
paper | slides | code | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Eliminating Redundant Actions from Plans using Classical Planning.
In Proceedings of the Twentieth International Conference on Principles of Knowledge Representation and Reasoning (KR 2023), pp. 774–778. 2023.
paper | code | citationClemens Büchner, Remo Christen, Augusto B. Corrêa, Salomé Eriksson, Patrick Ferber, Jendrik Seipp and Silvan Sievers.
Fast Downward Stone Soup 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | code | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
Levitron: Combining Ground and Lifted Planning.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
The Powerlifted Planning System in the IPC 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationAugusto B. Corrêa, Guillem Francès, Markus Hecher, Davide Mario Longo and Jendrik Seipp.
Scorpion Maidu: Width Search in the Scorpion Planning System.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDominik Drexler, Daniel Gnad, Paul Höft, Jendrik Seipp, David Speck and Simon Ståhlberg.
Ragnarok.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDominik Drexler, Jendrik Seipp and David Speck.
Odin: A Planner Based on Saturated Transition Cost Partitioning.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationPatrick Ferber, Michael Katz, Jendrik Seipp, Silvan Sievers, Daniel Borrajo, Isabel Cenamor, Tomas de la Rosa, Fernando Fernandez-Rebollo, Carlos Linares López, Sergio Nuñez, Alberto Pozanco, Horst Samulowitz and Shirin Sohrabi.
Hapori Stone Soup.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationPaul Höft, David Speck and Jendrik Seipp.
Dofri.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationMauricio Salerno, Raquel Fuentetaja and Jendrik Seipp.
Spock: Fast Downward Stone Soup with Redundant Action Elimination.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationJendrik Seipp.
Scorpion 2023.
In Tenth International Planning Competition (IPC-10): Planner Abstracts. 2023.
paper | citationDavid Speck, Paul Höft, Daniel Gnad and Jendrik Seipp.
Finding Matrix Multiplication Algorithms with Classical Planning — Extended Abstract.
In The 35th Annual Workshop of the Swedish Artificial Intelligence Society (SAIS). 2023.
paper | slides | poster | code | citation (Superseded by this paper.)Dominik Drexler and Jendrik Seipp.
DLPlan: Description Logics State Features for Planning.
In ICAPS 2023 System Demonstrations and Exhibits. 2023.
paper | citationDavid Speck, Paul Höft, Daniel Gnad and Jendrik Seipp.
Finding Matrix Multiplication Algorithms with Classical Planning.
In Proceedings of the Thirty-Third International Conference on Automated Planning and Scheduling (ICAPS 2023), pp. 411–416. 2023.
paper | slides | poster | code | citation
2022
Patrick Ferber, Liat Cohen, Jendrik Seipp and Thomas Keller.
Learning and Exploiting Progress States in Greedy Best-First Search.
In Proceedings of the 31st International Joint Conference on Artificial Intelligence (IJCAI 2022), pp. 4740–4746. 2022.
paper | slides | poster | code | citationDominik Drexler, Javier Segovia-Aguas and Jendrik Seipp.
Learning General Policies and Helpful Action Classifiers from Partial State Spaces.
In IJCAI 2022 Workshop on Generalization in Planning. 2022.
paper | slides | citationRemo Christen, Salomé Eriksson, Michael Katz, Emil Keyder, Christian Muise, Alice Petrov, Florian Pommerening, Jendrik Seipp, Silvan Sievers and David Speck.
(PARIS) Planning Algorithms for Reconfiguring Independent Sets.
In First CoRe Challenge: Solver and Graph Descriptions, pp. 15–22. 2022.
paper | citationAugusto B. Corrêa and Jendrik Seipp.
Best-First Width Search for Lifted Classical Planning.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 11–15. 2022.
paper | slides | poster | code | citationDominik Drexler, Jendrik Seipp and Hector Geffner.
Learning Sketches for Decomposing Planning Problems into Subproblems of Bounded Width.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 62–70. 2022.
paper | slides | poster | code | citationDavid Speck and Jendrik Seipp.
New Refinement Strategies for Cartesian Abstractions.
In Proceedings of the Thirty-Second International Conference on Automated Planning and Scheduling (ICAPS 2022), pp. 348–352. 2022.
paper | slides | recording | poster | code | citationChristian Muise, Florian Pommerening, Jendrik Seipp and Michael Katz.
Planutils: Bringing Planning to the Masses.
In ICAPS 2022 System Demonstrations and Exhibits. 2022.
paper | recording | poster | citationClemens Büchner, Patrick Ferber, Jendrik Seipp and Malte Helmert.
A Comparison of Abstraction Heuristics for Rubik's Cube.
In ICAPS 2022 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP). 2022.
paper | slides | recording | code | citationAndré Biedenkapp, David Speck, Silvan Sievers, Frank Hutter, Marius Lindauer and Jendrik Seipp.
Learning Domain-Independent Policies for Open List Selection.
In ICAPS 2022 Workshop on Bridging the Gap Between AI Planning and Reinforcement Learning (PRL). 2022.
paper | slides | recording | citationPatrick Ferber and Jendrik Seipp.
Explainable Planner Selection for Classical Planning.
In Proceedings of the Thirty-Sixth AAAI Conference on Artificial Intelligence (AAAI 2022), pp. 9741–9749. 2022.
paper | slides | poster | code | citation
2021
Dominik Drexler, Jendrik Seipp and Hector Geffner.
Expressing and Exploiting the Common Subgoal Structure of Classical Planning Domains Using Sketches.
In Proceedings of the Eighteenth International Conference on Principles of Knowledge Representation and Reasoning (KR 2021), pp. 258–268. 2021.
paper | slides | recording | poster | citationSimon Ståhlberg, Guillem Francès and Jendrik Seipp.
Learning Generalized Unsolvability Heuristics for Classical Planning.
In Proceedings of the 30th International Joint Conference on Artificial Intelligence (IJCAI 2021), pp. 4175–4181. 2021.
paper | slides | poster | code | citationDominik Drexler, Jendrik Seipp and David Speck.
Subset-Saturated Transition Cost Partitioning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 131–139. 2021.
paper | slides | poster | code | citationFlorian Pommerening, Thomas Keller, Valentina Halasi, Jendrik Seipp, Silvan Sievers and Malte Helmert.
Dantzig-Wolfe Decomposition for Cost Partitioning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 271–280. 2021.
paper | technical report | slides | recording | poster | code | citationJendrik Seipp.
Online Saturated Cost Partitioning for Classical Planning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 317–321. 2021.
paper | slides | poster | code | citationÁlvaro Torralba, Jendrik Seipp and Silvan Sievers.
Automatic Instance Generation for Classical Planning.
In Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021), pp. 376–384. 2021.
paper | slides | poster | code | citationJendrik Seipp, Thomas Keller and Malte Helmert.
Saturated Post-hoc Optimization for Classical Planning.
In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence (AAAI 2021), pp. 11947–11953. 2021.
paper | slides | recording | poster | code | citation
2020
Jendrik Seipp, Samuel von Allmen and Malte Helmert.
Incremental Search for Counterexample-Guided Cartesian Abstraction Refinement.
In Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling (ICAPS 2020), pp. 244–248. 2020.
paper | slides | recording | poster | code | citationJendrik Seipp.
Online Saturated Cost Partitioning for Classical Planning.
In ICAPS 2020 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP), pp. 16–22. 2020.
paper | slides | recording | code | citation (Superseded by this paper.)Patrick Ferber and Jendrik Seipp.
Explainable Planner Selection.
In ICAPS 2020 Workshop on Explainable AI Planning (XAIP). 2020.
paper | slides | recording | poster | citation (Superseded by this paper.)Álvaro Torralba, Jendrik Seipp and Silvan Sievers.
Automatic Configuration of Benchmark Sets for Classical Planning.
In ICAPS 2020 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP), pp. 58–66. 2020.
paper | slides | recording | citation (Superseded by this paper.)Gabriele Röger, Malte Helmert, Jendrik Seipp and Silvan Sievers.
An Atom-Centric Perspective on Stubborn Sets.
In Proceedings of the 13th Annual Symposium on Combinatorial Search (SoCS 2020), pp. 57–65. 2020.
paper | slides | recording | code | citationJendrik Seipp, Thomas Keller and Malte Helmert.
Saturated Cost Partitioning for Optimal Classical Planning.
Journal of Artificial Intelligence Research 67, pp. 129–167. 2020.
paper | code | citation
2019
Jendrik Seipp.
Pattern Selection for Optimal Classical Planning with Saturated Cost Partitioning.
In Proceedings of the 28th International Joint Conference on Artificial Intelligence (IJCAI 2019), pp. 5621–5627. 2019.
paper | slides | code | citationJendrik Seipp and Malte Helmert.
Subset-Saturated Cost Partitioning for Optimal Classical Planning.
In Proceedings of the Twenty-Ninth International Conference on Automated Planning and Scheduling (ICAPS 2019), pp. 391–400. 2019.
paper | technical report | slides | code | citationJendrik Seipp.
Planner Metrics Should Satisfy Independence of Irrelevant Alternatives.
In ICAPS 2019 Workshop on the International Planning Competition (WIPC), pp. 40–41. 2019.
paper | slides | citationJendrik Seipp.
Pattern Selection for Optimal Classical Planning with Saturated Cost Partitioning.
In ICAPS 2019 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP), pp. 72–80. 2019.
paper | slides | citation (Superseded by this paper.)
2018
Jendrik Seipp and Malte Helmert.
Counterexample-Guided Cartesian Abstraction Refinement for Classical Planning.
Journal of Artificial Intelligence Research 62, pp. 535–577. 2018.
paper | citationJendrik Seipp.
Fast Downward Remix.
In Ninth International Planning Competition (IPC-9): Planner Abstracts, pp. 74–76. 2018.
paper | citationJendrik Seipp.
Fast Downward Scorpion.
In Ninth International Planning Competition (IPC-9): Planner Abstracts, pp. 77–79. 2018.
paper | citationJendrik Seipp and Gabriele Röger.
Fast Downward Stone Soup 2018.
In Ninth International Planning Competition (IPC-9): Planner Abstracts, pp. 80–82. 2018.
paper | citationJendrik Seipp.
Counterexample-guided Cartesian Abstraction Refinement and Saturated Cost Partitioning for Optimal Classical Planning.
PhD thesis, University of Basel, 2018.
paper | slides | recording | citation
2017
Jendrik Seipp, Thomas Keller and Malte Helmert.
A Comparison of Cost Partitioning Algorithms for Optimal Classical Planning.
In Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling (ICAPS 2017), pp. 259–268. 2017.
paper | slides | recording | poster | citationJendrik Seipp.
Better Orders for Saturated Cost Partitioning in Optimal Classical Planning.
In Proceedings of the 10th Annual Symposium on Combinatorial Search (SoCS 2017), pp. 149–153. 2017.
paper | slides | citationJendrik Seipp, Thomas Keller and Malte Helmert.
Narrowing the Gap Between Saturated and Optimal Cost Partitioning for Classical Planning.
In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI 2017), pp. 3651–3657. 2017.
paper | slides | citation
2016
Thomas Keller, Florian Pommerening, Jendrik Seipp, Florian Geißer and Robert Mattmüller.
State-dependent Cost Partitionings for Cartesian Abstractions in Classical Planning.
In Proceedings of the 25th International Joint Conference on Artificial Intelligence (IJCAI 2016), pp. 3161–3169. 2016.
paper | technical report | citationJendrik Seipp, Florian Pommerening, Gabriele Röger and Malte Helmert.
Correlation Complexity of Classical Planning Domains.
In Proceedings of the 25th International Joint Conference on Artificial Intelligence (IJCAI 2016), pp. 3242–3250. 2016.
paper | slides | poster | citationFlorian Pommerening and Jendrik Seipp.
Fast Downward Dead-End Pattern Database.
In Unsolvability International Planning Competition: Planner Abstracts, pp. 2. 2016.
paper | citationJendrik Seipp, Florian Pommerening, Silvan Sievers, Martin Wehrle, Chris Fawcett and Yusra Alkhazraji.
Fast Downward Aidos.
In Unsolvability International Planning Competition: Planner Abstracts, pp. 28–38. 2016.
paper | code | citationJendrik Seipp, Florian Pommerening, Gabriele Röger and Malte Helmert.
Correlation Complexity of Classical Planning Domains.
In ICAPS 2016 Workshop on Heuristics and Search for Domain-independent Planning (HSDIP), pp. 12–20. 2016.
paper | slides | citation (Superseded by this paper.)
2015
Jendrik Seipp, Florian Pommerening and Malte Helmert.
New Optimization Functions for Potential Heuristics.
In Proceedings of the Twenty-Fifth International Conference on Automated Planning and Scheduling (ICAPS 2015), pp. 193–201. 2015.
paper | slides | recording | citationJendrik Seipp, Silvan Sievers, Malte Helmert and Frank Hutter.
Automatic Configuration of Sequential Planning Portfolios.
In Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence (AAAI 2015), pp. 3364–3370. 2015.
paper | technical report | slides | code | data | citationFlorian Pommerening, Malte Helmert, Gabriele Röger and Jendrik Seipp.
From Non-Negative to General Operator Cost Partitioning.
In Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence (AAAI 2015), pp. 3335–3341. 2015.
paper | technical report | erratum | slides | citation
2014
Jendrik Seipp, Silvan Sievers and Frank Hutter.
Fast Downward SMAC.
In Eighth International Planning Competition (IPC-8) Planning and Learning Part: Planner Abstracts. 2014.
paper | code | citationJendrik Seipp, Silvan Sievers and Frank Hutter.
Fast Downward Cedalion.
In Eighth International Planning Competition (IPC-8) Planning and Learning Part: Planner Abstracts. 2014.
paper | code | citationJendrik Seipp, Silvan Sievers and Frank Hutter.
Fast Downward Cedalion.
In Eighth International Planning Competition (IPC-8): Planner Abstracts, pp. 17–27. 2014.
paper | code | citationJendrik Seipp, Manuel Braun and Johannes Garimort.
Fast Downward Uniform Portfolio.
In Eighth International Planning Competition (IPC-8): Planner Abstracts, pp. 32. 2014.
paper | citationGabriele Röger, Florian Pommerening and Jendrik Seipp.
Fast Downward Stone Soup 2014.
In Eighth International Planning Competition (IPC-8): Planner Abstracts, pp. 28–31. 2014.
paper | citationJendrik Seipp and Malte Helmert.
Diverse and Additive Cartesian Abstraction Heuristics.
In Proceedings of the Twenty-Fourth International Conference on Automated Planning and Scheduling (ICAPS 2014), pp. 289–297. 2014.
paper | slides | recording | citation
2013
Jendrik Seipp and Malte Helmert.
Additive Counterexample-guided Cartesian Abstraction Refinement.
In Late-Breaking Developments in the Field of Artificial Intelligence – Papers Presented at the Twenty-Seventh AAAI Conference on Artificial Intelligence (AAAI 2013) – AAAI Technical Report WS-13-17, pp. 119–121. 2013.
paper | citationJendrik Seipp and Malte Helmert.
Counterexample-guided Cartesian Abstraction Refinement.
In Proceedings of the Twenty-Third International Conference on Automated Planning and Scheduling (ICAPS 2013), pp. 347–351. 2013.
paper | slides | recording | citation
2012
Jendrik Seipp.
Counterexample-guided Abstraction Refinement for Classical Planning.
Master's thesis, University of Freiburg, 2012.
paper | citationJendrik Seipp, Manuel Braun, Johannes Garimort and Malte Helmert.
Learning Portfolios of Automatically Tuned Planners.
In Proceedings of the Twenty-Second International Conference on Automated Planning and Scheduling (ICAPS 2012), pp. 368–372. 2012.
paper | technical report | slides | code | citation (This version of the paper fixes a small mistake in the published version. In Section "Tuning Planners", the published version states that preferred operators are used in 20 of the 21 configurations. The correct statement is that they are used in 19 of the 21 configurations.)
2011
Carmel Domshlak, Malte Helmert, Erez Karpas, Emil Keyder, Silvia Richter, Gabriele Röger, Jendrik Seipp and Matthias Westphal.
BJOLP: The Big Joint Optimal Landmarks Planner.
In IPC 2011 Planner Abstracts, pp. 91–95. 2011.
paper | citationChris Fawcett, Malte Helmert, Holger Hoos, Erez Karpas, Gabriele Röger and Jendrik Seipp.
FD-Autotune: Automated Configuration of Fast Downward.
In IPC 2011 Planner Abstracts, pp. 31–37. 2011.
paper | citationChris Fawcett, Malte Helmert, Holger Hoos, Erez Karpas, Gabriele Röger and Jendrik Seipp.
FD-Autotune: Domain-Specific Configuration of Fast Downward.
In IPC 2011 Planner Abstracts, Planning and Learning Part. 2011.
paper | citationMalte Helmert, Gabriele Röger, Jendrik Seipp, Erez Karpas, Jörg Hoffmann, Emil Keyder, Raz Nissim, Silvia Richter and Matthias Westphal.
Fast Downward Stone Soup.
In IPC 2011 Planner Abstracts, pp. 38–45. 2011.
paper | citationChris Fawcett, Malte Helmert, Holger Hoos, Erez Karpas, Gabriele Röger and Jendrik Seipp.
FD-Autotune: Domain-Specific Configuration using Fast Downward.
In ICAPS 2011 Workshop on Planning and Learning, pp. 13–17. 2011.
paper | citationJendrik Seipp and Malte Helmert.
Fluent Merging for Classical Planning Problems.
In ICAPS 2011 Workshop on Knowledge Engineering for Planning and Scheduling, pp. 47–53. 2011.
paper | slides | code | citation (This version of the paper fixes two mistakes (in Def. 2 and in the text after Def. 3) that are present in the version of the paper that is linked from the workshop webpage.)
2009
Jendrik Seipp.
Fluent Merging für klassische Planungsprobleme.
Bachelor's thesis, University of Freiburg, 2009.
paper | citation (In German.)